Kontroler Arduino PID: 2 metody ustawień

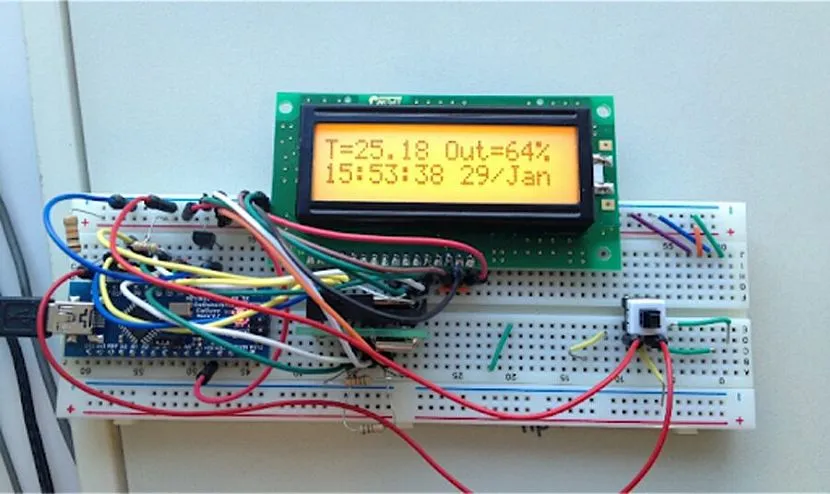
Przed montażem kontrolera PID na Arduino własnymi rękami, zrozumienie terminologii nie będzie zbyteczne, aby jasno zrozumieć, z czym mamy do czynienia. Tak więc PID lub proporcjonalno-całkujący różniczkowy (regulator) jest transliteracją angielskiego skrótu PID lub różniczkowego proporcjonalno-całkującego (regulator). Z kolei Arduino to niewielka płytka, która ma własny procesor i pamięć. Jeśli wszystko jest jasne z terminologią, przejdźmy do bardziej szczegółowych wyjaśnień.
Regulator PID - co to jest
Regulator PID jest kompaktowym urządzeniem zintegrowanym z pętlą sterowania, gdzie sprzężenie zwrotne jest obowiązkowe. Takie urządzenie służy do utrzymywania dowolnych trybów i najczęściej jest to korekta temperatury powietrza. Czujniki dokonują odczytów zgodnie z aktualnie istniejącymi parametrami i wysyłają sygnał do urządzenia sterującego. Taki kontroler charakteryzuje się niemal idealnymi wskaźnikami dokładności procesów przejściowych, co w pełni zapewnia skuteczność terminowej regulacji parametrów.
Trzy wzmocnienia regulatora PID
Funkcją proporcjonalno-całkującego regulatora różnicowego jest dostarczanie sygnału wyjściowego wskazującego stan mocy wymaganej do ustabilizowania parametru na poziomie określonym przez użytkownika.
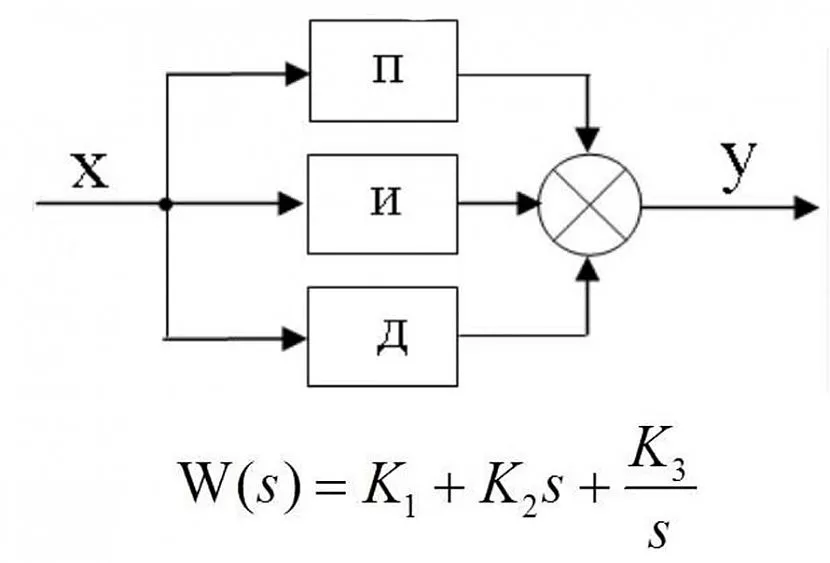
Aby uzyskać dokładny wskaźnik, stosuje się wzór matematyczny wskazany na górnym obrazie, który zawiera trzy współczynniki:
- Proporcjonalny.
- Całka.
- Mechanizm różnicowy.
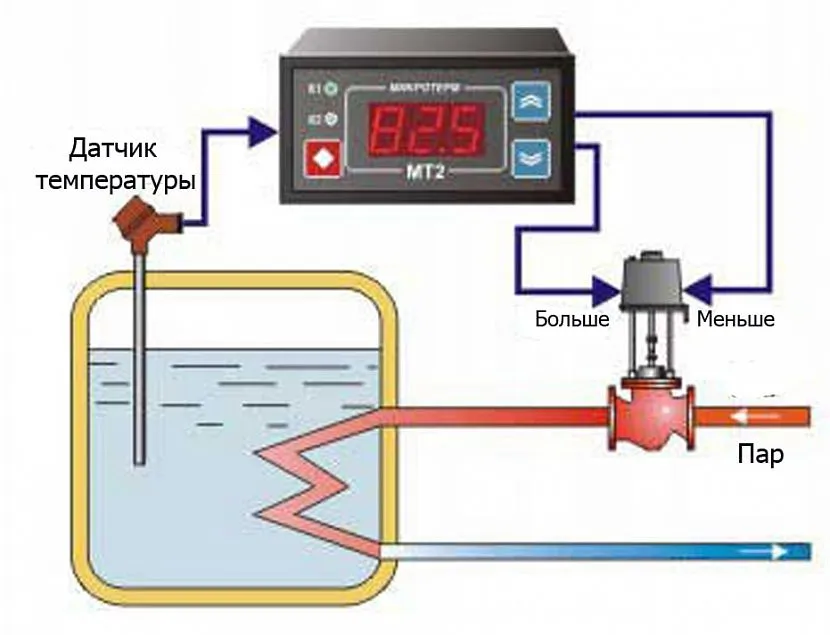
Na przykład rozważymy zbiornik z podgrzewaną wodą, w którym konieczne jest stałe utrzymywanie określonej temperatury za pomocą zaworu parowego:
- Wskaźnik proporcjonalności występuje w przypadku niezgodności z wcześniej ustawionymi parametrami, czyli różnicy pomiędzy temperaturą rzeczywistą a zadaną (nominalną), która jest mnożona przez współczynnik korekty. W rezultacie powstaje impuls wyjściowy, który podawany jest do grzałki - oznacza to, że gdy temperatura spada, ogrzewanie natychmiast się włącza. Po osiągnięciu żądanej temperatury wyłącza się, a po przegrzaniu chłodzi.
- Składnik integralny służy do kompensacji wpływu środowiska lub innych czynników zakłócających, które wpływają na stabilność określonej temperatury. Ponieważ takie czynniki osób trzecich są stale obecne, to w momencie otrzymania wskaźników do obliczania składnika integralnego liczba się zmienia. Im większy wpływ z zewnątrz, tym większe wahania wskaźników – to skoki w zasilaniu. Ten składnik próbuje zwrócić oryginalną wartość, gdy ulegnie zmianie.
- Składnik różnicowy kompensuje skutki opóźnień, które występują z powodu opóźnień zewnętrznych wpływających na tryb nominalny i sprzężenie zwrotne. Sterownik uruchamia grzanie, które będzie działało do momentu osiągnięcia zadanej temperatury, chociaż przy wyższych wartościach mogą wystąpić błędy. Błędy z kolei prowadzą do przegrzania cieczy, więc dyferencjał z góry zmniejsza moc grzałki.
Przydatne wideo
Ustawianie i przypisywanie regulatora PID
Istnieją co najmniej dwie metody strojenia PID:
- Synteza polega na obliczeniu parametrów na podstawie samego modelu. Taka regulacja okazuje się niemal idealna, ale wymaga głębokiej świadomości teoretycznej wiedzy na temat autokontroli, dlatego trzeba mieć do tego specjalne wykształcenie.
- Metoda ręczna opiera się na próbkach – często żartobliwie nazywana też „metodą naukową poke” – tutaj podstawą są wskaźniki gotowego systemu, które są regulowane współczynnikiem regulatora. Po obserwacji systemu w fazie aktywnej brane są ostateczne wskaźniki i korygowane we właściwym kierunku. Trwa to aż system osiągnie pożądany poziom.
W rzeczywistości pierwsza metoda strojenia jest stosowana niezwykle rzadko, ponieważ bardzo niewiele osób ze specjalnym wykształceniem korzysta z regulatora PID, dlatego logiczne jest, że metoda nr 2 jest najczęściej (prawie stale) używana. Oprócz temperatury regulator PID może sterować innymi parametrami.
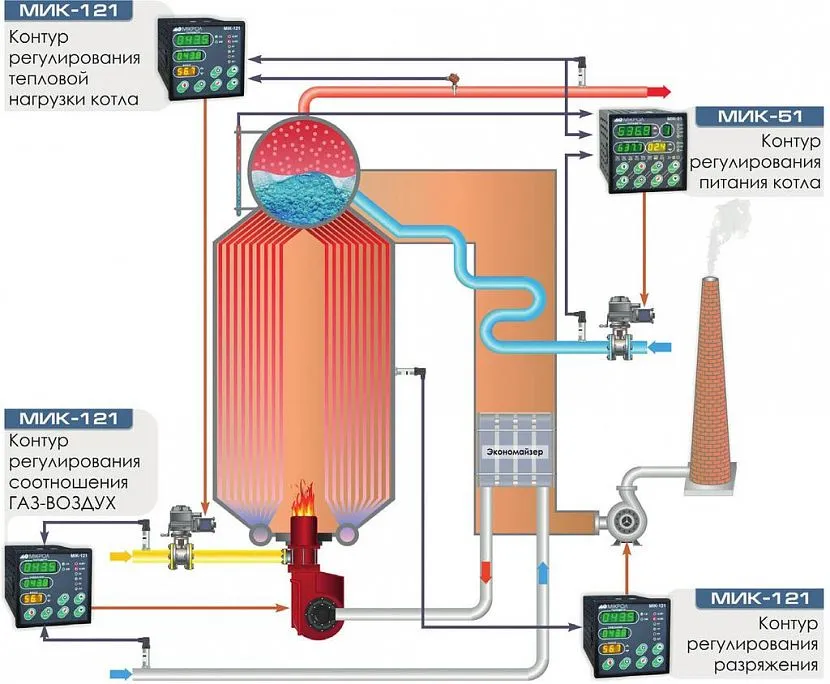
Należy zauważyć, że PID są przeznaczone nie tylko do pomiaru i utrzymywania pożądanej temperatury, ale także do kontrolowania i utrzymywania pożądanego poziomu ciśnienia w zbiornikach, przepływu cieczy lub gazów w rurociągach i tak dalej. Ostatecznym celem takich systemów jest odczyt dokładnego impulsu sterującego zdolnego do sterowania inkubatorami, browarami, gorzelniami, dużymi zakładami produkcyjnymi, a nawet reaktorami elektrowni jądrowych.
Przydatne wideo
Wniosek
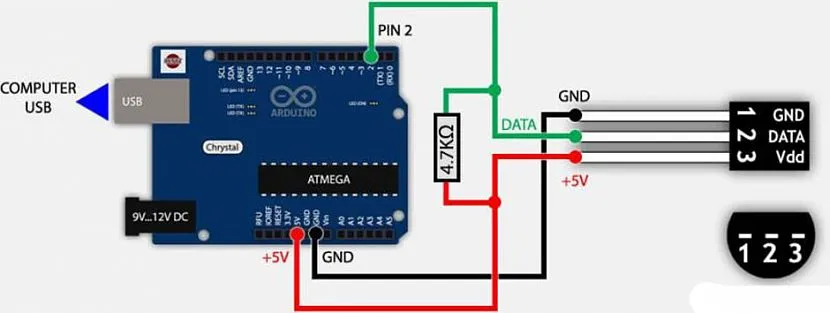
Możesz zmontować taki system własnymi rękami, na przykład, aby utrzymać mikroklimat w dowolnym pomieszczeniu, ale to już temat na osobny artykuł i opublikujemy go nieco później. W tej chwili masz możliwość ogólnego zapoznania się z kontrolerem Arduino PID w celu określenia jego zapotrzebowania w swoim gospodarstwie domowym.