ПІД-контролер Arduino: 2 методи налаштування

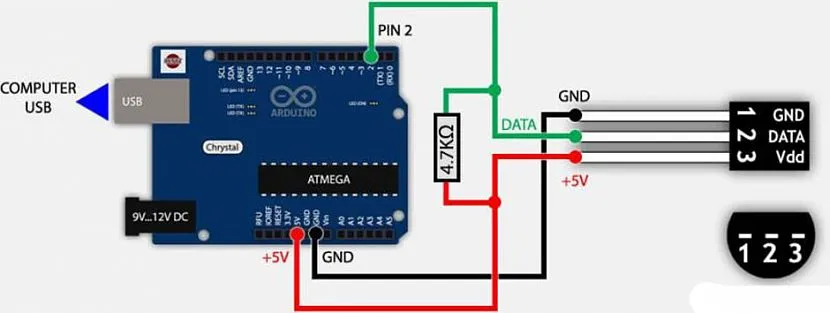
Перш ніж збирати PID регулятор на Arduino своїми руками, не зайвим буде розібратися з термінологією, щоб зрозуміти, з чим ми маємо справу. Отже, ПІД чи пропорційно-інтегральний диференціальний (регулятор) – це транслітерація англійської абревіатури PID або proportional-integral differential (regulator). А ось Arduino є невеликою платою, яка має власний процесор і пам'ять. Якщо з термінологією все ясно, то перейдемо до більш детальних пояснень.
PID регулятор – що це
PID регулятор являє собою компактний пристрій, інтегрований в контур управління, де обов'язково є зворотний зв'язок. Такий прилад використовують для підтримки будь-яких заданих режимів і найчастіше це корекція температури повітря. Сенсорні датчики знімають показання за існуючими в даний момент параметрами, і подають сигнал на пристрій, що регулює. Такому контролеру притаманні практично ідеальні показники точності перехідних процесів, що забезпечує результативність своєчасного регулювання параметрів.
Три коефіцієнти PID регулятора
Функціонал proportional-integral differential regulator полягає у подачі вихідного сигналу, який сповіщає про стан потужності, необхідної для стабілізації параметра на рівні, заданому користувачем.
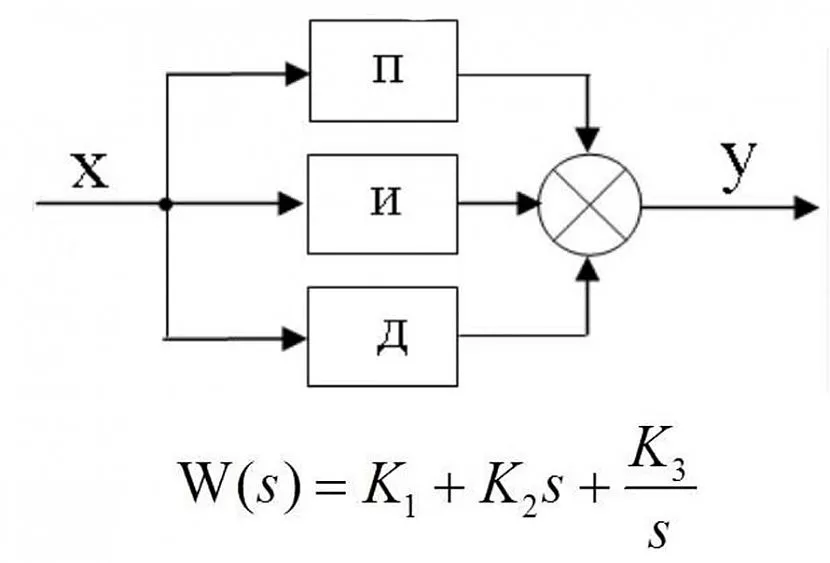
Для отримання точного показника застосовується вказана на верхньому зображенні математична формула, що містить три коефіцієнти:
- Пропорційний (Proportional).
- Інтегральний (Integral).
- Диференціальний (Differential).
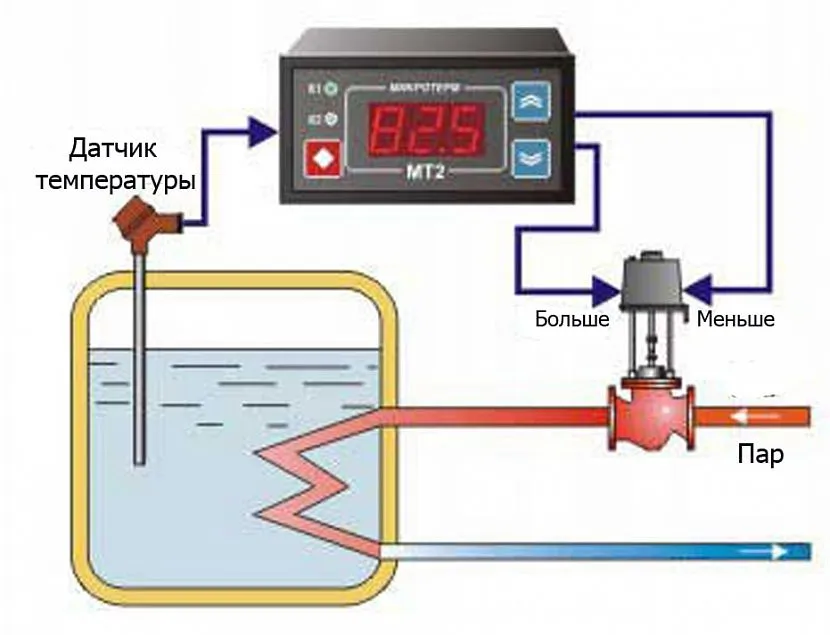
Наприклад, ми розглянемо резервуар з підігрітою водою, в якому необхідно постійно підтримувати заздалегідь задану температуру за допомогою парового клапана:
- Proportional показник виникає тоді, коли відбувається неузгодження з раніше заданими параметрами, тобто різниця між реальною температурою та заданою (номінальною), яка множиться на коефіцієнт налаштування. У результаті утворюється вихідний імпульс, який подається на обігрівач - це означає, що при зниженні температури одночасно включається підігрів. Досягши потрібного температурного режиму відбувається відключення, а при перегріві – охолодження.
- Integral складова служить для компенсації впливу навколишнього середовища або інших факторів, що впливають на стабільність заданої заздалегідь температури. Так як такі сторонні фактори є постійно, то на момент надходження показників для обчислення Integral складової цифра змінюється. Чим більший вплив ззовні, тим більше коливання показників – це стрибки на потужності. Ця складова намагається повернути вихідне значення за його зміни.
- Differential компонент компенсує вплив затримок, які виникають через зовнішні затримки, що впливають на номінальний режим і зворотної реакції. Регулятор запускає підігрів, який буде працювати доти, доки температура не досягне заздалегідь заданої позначки, хоча при великих значеннях можуть виникати похибки. Помилки, у свою чергу, призводять до перегріву рідини, тому диференціал заздалегідь знижує потужність обігрівача.
Корисне відео
Налаштування та призначення PID регулятора
Існує, як мінімум, два методи налаштування PID:
- Синтез передбачає розрахунок параметрів на основі самої моделі. Таке регулювання виходить, чи не ідеальним, але воно вимагає глибокої поінформованості в теоретичних знаннях автоуправління, отже, для цього потрібно мати спеціальну освіту.
- Ручний метод заснований на пробах - його також часто жартома називають «методом наукового тику» - тут основою є показники готової системи, які коригуються коефіцієнтом регулятора. Після спостереження за системою активно фазі, беруться кінцеві показники і виправляються в потрібну сторону. Так триває доти, доки система не вийде на бажаний рівень.
По суті, перший метод налаштування застосовується вкрай рідко, оскільки існує дуже мало людей зі спеціальною освітою, які користуються регулятором PID, отже, цілком логічно, що найчастіше (майже постійно) використовується спосіб №2. Крім температури PID, регулятор може контролювати інші параметри.
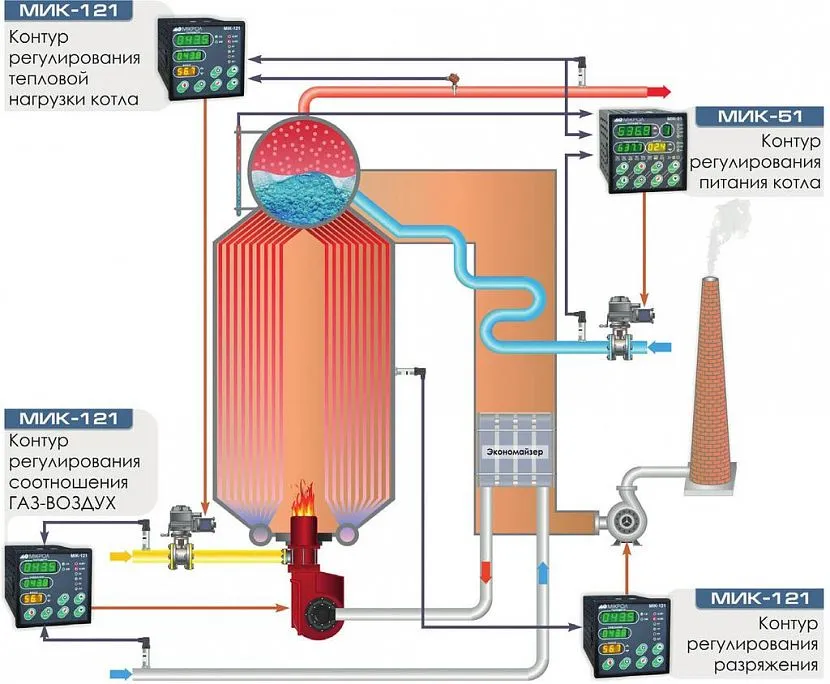
Слід зазначити, що PID призначені не тільки для вимірювання та підтримки потрібної температури, але також для контролю та підтримки потрібного рівня тиску в ємностях, витрата рідин або газів у трубопроводах тощо. Кінцевою метою для таких систем є зчитування точного керуючого імпульсу, здатного контролювати інкубатори, броварні, гуральні, великі виробничі потужності і навіть реактори АЕС.
Корисне відео
Висновок
Подібну систему можна зібрати своїми руками, наприклад, для підтримки мікроклімату в якомусь приміщенні, але це вже тема для окремої статті і ми викладемо її трохи згодом. На даний момент у вас є можливість ознайомитися PID регулятором Arduino в загальних рисах, щоб визначити його необхідність у вашому господарстві.